
![图片[1]-ROS 机器人操作系统介绍及 Windows WSL2 安装 ROS Melodic 教程 - 工业技术网](https://www.zuodianshier.com/wp-content/uploads/2025/04/配图2-1.webp)
一、斯科特.哈森
机器人操作系统 (ROS) 是编写机器人软件的灵活框架。讲ROS必须先说一下柳树车库公司(Willow Garage),斯科特.哈森在2006年创立。
斯科特.哈森这个人非常传奇,大学是在纽约州立大学布法罗分校,研究生先在圣路易斯华盛顿大学读,然后又去了斯坦福大学(不知道这哥们为啥读了两次研究生),就在斯坦福大学,他认识了Google创始人谢尔盖·布林和拉里·佩奇等很多互联网大神。
哈森和谷歌创始人布林和佩奇一道在斯坦福大学学习,哈森所做过的一个项目就是开发Google搜索引擎原型,写了Google的很多关键代码,Google第一个爬虫软件就是他写的。谷歌刚成立,他就投资了800美元。
之后,哈森自己又开发叫e Groups的e-mail应用,哈森在斯坦福大学并没有完成学业,就中途退学了,创立了e Group公司,拉里·佩奇的哥哥卡尔·佩奇也是e Groups的创始人之一,2000年以4.32亿美元卖给了当时如日中天的互联网巨头Yahoo,成为Yahoo Groups,该产品为雅虎赢得无数用户。
有钱后,他做了两件事,第一,再次慷慨的投资了好朋友的公司Google,那时候Google才刚起步,这笔投资后来肯定为他带来了很多收益。第二,他想找点有意义的事情做,认为服务机器人有意义,就是能给人生活起居提供帮助的机器人。2006年买了柳树街68号这栋别墅,作为办公地点。
为了致敬早期在硅谷创业,在车库办公的前辈,例如苹果、微软,他把公司名字就起了Willow Garage,意思是柳树街的车库。
![图片[2]-ROS 机器人操作系统介绍及 Windows WSL2 安装 ROS Melodic 教程 - 工业技术网](https://www.zuodianshier.com/wp-content/uploads/2025/04/配图2-2.webp)
二、ROS
2010年3月2日柳树车库发布了ROS Box Turtle。
2014年,柳树车库研发机器人太烧钱,研发出的机器人又很少有人买,斯科特.哈森决定停止投入资金。这时的ROS的开发已经转交给一个独立的非盈利组织:“开源机器人基金会”(Open Source Robotics Foundation, OSRF)。
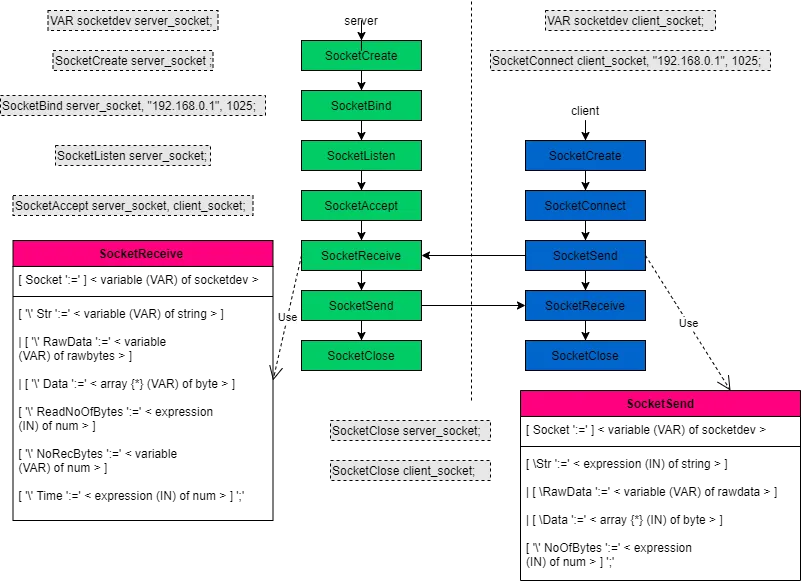
ROS将现有的、通常难以使用、不兼容的传感器、执行器等硬件整合在一起,通过将其数据流转换成消息总线,使用在硬件驱动器和计算单元之间兼容的数据类型。
它类似于中间件,可以为我们提供各种测试,验证算法,它确实很复杂,也挺值得我们去学习使用。
三、wsl2安装使用
//备注:具体可参照微软官方文档
-
使用管理员权限打开powershell
-
启用“适用于 Linux 的 Windows 子系统”可选功能:
_dism.exe/online/enable-feature/featurename:Microsoft-Windows-Subsystem-Linux/all/norestart -
启用“虚拟机平台”可选组件:
dism.exe/online/enable-feature/featurename:VirtualMachinePlatform/al/norestart -
下载
-
重启电脑
-
重新管理员身份打开powershell,用下面的命令将wsl2设置为默认:
wsl --set-default-version 2 -
搜索安装Ubuntu 18.04 LTS
四、wsl2安装ROS
//备注:具体可参照ROS官方文档
-
添加用户名
-
设置用户密码
-
切换root用户
sudo su root -
添加清华镜像源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list -
设置密钥Key
curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add - -
更新源 更新软件
sudo apt-get updatesudo apt-get upgrade -
安装ROS
sudo apt-get install ros-melodic-desktop-full -
配置环境
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrcsource ~/.bashrc -
安装依赖
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential -
初始化ROS
sudo rosdep initrosdep update
五、图形化显示
图形化显示,可以安装图形界面然后远程登陆,可以用VcXsrv,但我这里用的是MobaXterm,非常好用推荐给大家,而且还是汉化版的,后台可回复MobaXterm,得到MobaXterm下载链接。
-
在MobaXterm里打开wsl
-
配置编辑
sudo vim ~/.bashrc
添加以下
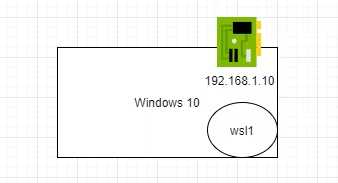
export DISPLAY=:0 # in WSL 1export DISPLAY=$(awk '/nameserver / {print $2; exit}' /etc/resolv.conf 2>/dev/null):0 # in WSL 2export LIBGL_ALWAYS_INDIRECT=export LIBGL_ALWASY_SOFTWARE=1export DISPLAY=:0 # in WSL 1 export DISPLAY=$(awk '/nameserver / {print $2; exit}' /etc/resolv.conf 2>/dev/null):0 # in WSL 2 export LIBGL_ALWAYS_INDIRECT= export LIBGL_ALWASY_SOFTWARE=1export DISPLAY=:0 # in WSL 1 export DISPLAY=$(awk '/nameserver / {print $2; exit}' /etc/resolv.conf 2>/dev/null):0 # in WSL 2 export LIBGL_ALWAYS_INDIRECT= export LIBGL_ALWASY_SOFTWARE=1
-
完成后ESC再输入:wq保存退出,然后记住 source:
source ~/.bashrc -
安装x11
sudo apt install x11-apps -
运行,出现“小眼睛”
xeyes
六、
运行小乌龟
在3个不同的窗口分别输入命令行:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
然后在 turtlesim turtle_teleop_key 的窗口按方向键,小乌龟顺利跑起来了












暂无评论内容