
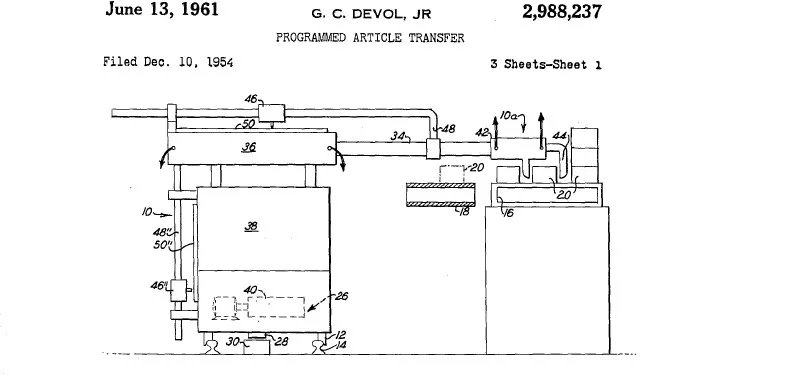
一、系统架构
控制器由硬件及软件两部分组成。
![图片[1]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222142923491.png)
控制器硬件核心在于芯片,为了保证控制系统具有足够的计算与存储能力,目前工业机器人控制器多采用计算能力较强的ARM 系列、DSP 系列、Intel 等系列芯片。
软件包括操作系统和算法库两部分。
![图片[2]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222143004673.webp)
机器人的操作系统对实时性有较高要求,例如Windows和Linux等通用操作系统都不是实时操作系统,工业机器人有专用操作系统包括VxWorks(嵌入式实时操作系统)、Windows CE、嵌入式Linux、μC/OS-Ⅱ以及通用ROS 平台等,其中Windows CE、嵌入式Linux、μC/OS-Ⅱ以及通用ROS 平台为使用较多的开源操作系统。其中VxWorks在军事和工业应用较多,例如被应用于战斗机和火箭上。
算法库又包括底层算法库以及应用工艺算法。
底层算法库的运动学控制算法即规划运动点位,负责控制工业机器人末端执行器按照规定的轨迹达到指定地点。动力学算法负责识别每一个姿态下机身负载物的转动惯量,使其保持最优化输出的状态。
应用工艺算法即二次开发,针对不同行业的应用工艺算法,只有在掌握底层算法的基础上才能较好地实现应用工艺算法。
现在驱控一体化是轻载型工业机器人的主要方向,基于现场总线的控制系统由控制模块、驱动模块和示教模块三部分组成,三者间的信号传输由电缆或网线完成。
因不同品牌的机械手架构实现方式不一样,编程语言不一样,操作界面不一样,在这篇文章中做一个简单的对比。
| 品牌 | 架构 | 操作系统构成 | 应用编程语言 | 优势 |
|---|---|---|---|---|
| abb | x86 | VxWorks | Rapid | 控制算法 |
| 库卡 | x86 | Windows+VxWorks | KUKA ROBOT language | 无 |
| fanuc | 未知 | fanuc自研 | KAREL | 产业整合 |
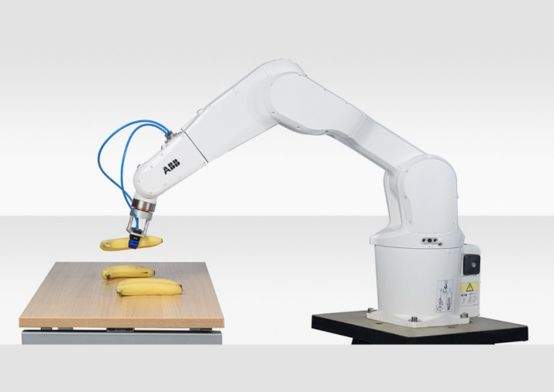
二、严谨的abb机器人
![图片[3]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222143055436.jpeg)
ABB具有PC SDK开发接口,方便开发。而且文档非常丰富,不管是内容的充实度还是排版都易于让人学习。
ABB现款IRC5的主控制器采用了x86架构。
运行VxWorks系统,负责机器人任务规划、外部通信、参数配置等上层任务。
伺服驱动部分由单独的Axis Computer完成,配备独立的放大模块。
示教器FlexPendant采用Arm+WinCE的方案,通过TCP/IP与主控制器Main Controller通信。
系统稳定、算法强大;碰撞检测灵敏,为预防硬件损害起到很逗作用;低温运行正常。不过价格相应的稍贵。
三、时尚的kuka机器人
![图片[4]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222143749106-1024x480.jpg)
KUKA的新一代控制器称为KR C4,其同样采用了软PLC的方案。该方案由KW公司提供,软PLC由IDE部分(被称为Multiprog)和Runtime(被称为ProConOS)组成。
![图片[5]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222143846295-1024x622.webp)
![图片[6]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222143902489-1024x473.webp)
ProConOS由C#开发。ProConOS Runtime同样运行在VxWorks之上,它们安装在控制器硬件中,其硬件采用了Intel双核CPU。
低于0摄氏度,会有开不了机的情况,故障率稍高,无开放的接口。
四、统一的fanuc机器人
FANUC的数控伺服系统
![图片[7]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222144559228-1024x358.webp)
FANUC的机床
![图片[8]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222144535630-1024x341.webp)
FANUC的机器人
![图片[9]-工业机器人系统介绍及ABB、KUKA、FANUC选型比较](https://cdn.zuodianshier.net/2023/12/20231222144451451-1024x426.webp)
FANUC通过它偏低的价格、超高的利润率(20%以上),证明了专注和产业链整合的力量。虽说无开放的接口,不过产品丰富,可以提供70多个选项包,平台统一。
但有点不爽的是,FANUC开放的文档太少了,偏保守,不利于用户学习。
FANUC 机器人系统的KAREL系统由机器人,控制器和系统软件组成。它使用用KAREL编程语言编写的程序来完成工业任务。
KAREL可以操作数据,控制和与相关设备进行通信并与操作员进行交互。
配备KAREL的系统 R-30iA 控制器可与各种机器人模型配合使用,以处理各种应用。这意味着常见的操作,编程和故障排除程序以及更少的备件。
KAREL系统扩展到包括全系列支持产品,如整体视觉,离线编程和特定于应用的软件包。







![表情[ciya]-工业技术网](https://www.zuodianshier.net/wp-content/themes/zibll/img/smilies/ciya.gif)
暂无评论内容