
一、萌芽
1954年,乔治·迪沃(GeorgeDevol)申请了第一个机器人的专利,1961年授予。 该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。 这就是所谓的示教再现机器人。 现有的机器人差不多都采用这种控制方式。
![图片[1]-工业机器人发展史](https://cdn.zuodianshier.net/2023/12/20231222152352166.webp)
1956年,基于迪沃的原始专利,约瑟夫·恩格尔贝格(Joseph F.Englberger)利用伺服系统的相关灵感,与迪沃共同开发了一台工业机器人——“尤尼梅特”(Unimate)。
1961年在通用汽车的生产车间里用于起重和堆叠热金属部件。
![图片[2]-工业机器人发展史](https://cdn.zuodianshier.net/2023/12/20231222152409547.webp)
Unimation机器人也被称为可编程移栽机,因为一开始他们的主要用途是从一个点传递对象到另一个,工作范围3m左右,精度为0.003mm左右。 他们用液压执行机构,并编入关节坐标,即在示教时存储和回放操作中的各关节的角度。
Unimation机器人的应用虽然是简单的重复操作,但展示了工业机械化的美好前景,也为工业机器人的蓬勃发展拉开了序幕。
1969年,维克多·沙因曼(Victor Scheinman)在斯坦福大学读书期间,获得了迪沃资助的奖学金。 迪沃带他参观Unimation机器人的工作过程,他了解到Unimation机器人是通过液压,虽说一些路径可以通过示教很多的中间点来实现,但没办法实时反馈机器人位置,做到真正的路径跟踪。
![图片[3]-工业机器人发展史](https://cdn.zuodianshier.net/2023/12/20231222152429199.webp)
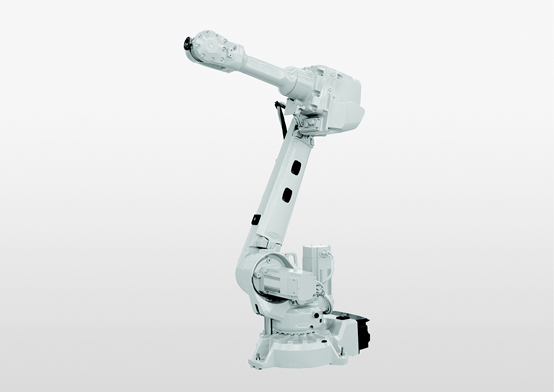
因此1978年他开发了工业机械臂(Programmable Universal Manipulation Arm),全电动,6轴多关节型机器人。
所有设计都包括两个主要部分:机械臂和控制系统,动力线和编码器线把两者连在一起。 控制计算机基于与PDP11计算机非常相似的LSI-11体系结构。 控制系统包括伺服电源、模拟和数字反馈处理板以及伺服驱动系统。
![图片[4]-工业机器人发展史](https://cdn.zuodianshier.net/2023/12/20231222152446200.webp)
它是现代工业机器人的雏形,能够精确地跟踪在空间中任意路径,拓宽了机器人更复杂的应用,如装配和焊接。
二、发展
Unimation公司授权其技术给川崎重工和GKN,分别在日本和英国生产Unimates工业机器人。
1967年日本成立了人工手研究会(现改名为仿生机构研究会),同年召开了日本首届机器人学术会。
1970年在美国召开了第一届国际工业机器人学术会议。
1970年以后,机器人的研究得到迅速广泛的普及。
在一段时间以来,Unimation的唯一竞争对手是美国俄亥俄州的辛辛那提米拉克隆公司(Cincinnati Milacron Inc.)。
1973年,辛辛那提·米拉克隆公司的理查德·豪恩制造了第一台由小型计算机控制的工业机器人,它是液压驱动的,能提升的有效负载达45公斤。
但是,在1970年代后期,日本在引进Unimation机器人后,几家大型日本企业集团都开始生产类似的工业机器人。
工业机器人在欧洲也兴起得相当快,ABB机器人公司1974年研发了世界上第一台全电控式工业机器人IRB6,主要应用于工件的取放和物料搬运。 1975年生产出第一台焊接机器人。 到1980年兼并Trallfa喷漆机器人公司后,其机器人产品趋于完备。 KUKA机器人公司1973年也研制开发了的第一台工业机器人。
在70年代末,对于机器人技术的兴趣在增加,许多美国公司进入该领域,包括例如通用电气和通用汽车公司它们与日本的Fanuc机器人公司成立了合资企业。 美国的创业公司包括Automatix和Adept Technology。
到了1980年,日本工业机器人经历了短暂的摇篮期,劳动力的短缺加上政府的支持,便很快进入实用阶段, 工业机器人在日本得到了巨大发展,日本也因此而赢得了“机器人王国”的美称。
在1984年的机器人热潮时期,Unimation公司被西屋电气公司以$1.07亿美元收购。 西屋电气公司于1988年将Unimation公司出售给法国史陶比尔公司。
三、现状
纵观这场波澜壮阔的工业机器人发展史,技术虽然在美国诞生,但随着日本和欧洲企业发展壮大,新生的或者有潜力的美国机器人公司被并购,而且美国还陷入了工业机器人会使失业率上升的争论,以及Unimation公司对液压还是电动的争论,愈陷愈深的财务赤字,最终美国没有形成足够规模的机器人产业。
最终全球机器人的大部分市场被欧系与日系机器人公司所占据。






![表情[ciya]-工业技术网](https://www.zuodianshier.net/wp-content/themes/zibll/img/smilies/ciya.gif)
暂无评论内容